ОБРАБОТКА ИНФОРМАЦИИ И УПРАВЛЕНИЕ X
УДК 621.396.96
НАПРАВЛЕНИЯ РАЗВИТИЯ РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ КОСМИЧЕСКОГО БАЗИРОВАНИЯ
О. Л. Полончик,
канд. техн. наук, доцент
Северный (Арктический) федеральный университет им. М. В. Ломоносова, г. Архангельск
Проанализированы основные направления развития радиолокационных систем контроля земной поверхности космического базирования. Определена предметная область использования радиолокационных технических средств, в том числе и для решения прикладных задач развития экономики северных и арктических регионов России. Выполнена сравнительная оценка существующих способов обзора земной поверхности. Предлагается новый метод построения бортовых радиолокационных систем на базе космических аппаратов со стабилизацией вращением. Рассмотрены пути улучшения технических характеристик бортового радиолокатора.
Ключевые слова - РЛС бокового обзора, диаграмма направленности, механическое сканирование, синтезирование апертуры.
Введение
Современные бортовые радиолокационные средства представляют одно из наиболее интенсивно развивающихся направлений радиоэлектронной техники. Особое место среди них занимают бортовые радиолокаторы с синтезированием апертуры. Данные технические средства производят зондирование земной поверхности в любое время суток, сезона и года, не зависят от климатических условий и наличия облачности, что особенно важно для районов с незначительным количеством солнечных дней в году. В Российской Федерации к ним относятся обширные площади на севере страны и в Арктике, составляющие почти третью часть территории нашего государства, очень богатую разнообразными полезными ископаемыми, нефтью и газом.
Решение важнейших народнохозяйственных задач, таких как высокоточная оценка рельефа местности, формирование трехмерных изображений земной поверхности, исследование динамических процессов на земной и морской поверхности, возлагается на перспективные средства дистанционного зондирования Земли .
Особенно актуальным для решения задач устойчивого развития северных и арктических регионов является получение материалов радиолокационной съемки с высокими измерительными свойствами, обеспечивающих создание и обновление государственных топографических карт,
планов и картографической основы государственного кадастра недвижимости.
Получение информации о состоянии этих районов представляет задачу исключительной важности и позволит минимизировать материальные потери.
История развития радиолокационных средств дистанционного зондирования Земли
Развитие бортовых радиолокационных станций (РЛС) привело к созданию радиолокационных систем кругового обзора, основным недостатком которых была низкая разрешающая способность. Дальнейшие исследования по совершенствованию РЛС обзора земной поверхности были направлены на преодоление основного ограничения в увеличении разрешающей способности, связанного с размерами антенных устройств.
Детальность радиолокационного изображения зависит от линейной разрешающей способности (разрешающей способности по дальности) радиолокатора, которая в радиальном направлении определяется зондирующим сигналом, в поперечном направлении (тангенциальная разрешающая способность) - шириной диаграммы направленности (ДН) и расстоянием до цели.
Задача увеличения разрешающей способности по дальности решается использованием зондирующих сигналов с малой длительностью им-
Летательный аппарат
пульсов или переходом к сложным сигналам - частотно-модулированным либо фазоманипули-рованным.
Повышение тангенциальной разрешающей способности достигается применением в бортовом радиолокаторе антенны, расположенной вдоль фюзеляжа самолета, или синтезированием апертуры антенны при движении летательного аппарата.
Первый путь привел к разработке радиолокаторов бокового обзора . Схема реализации метода представлена на рис. 1. В таких радиолокаторах тангенциальная разрешающая способность тем выше, чем больше продольный размер фюзеляжа летательного аппарата, хотя зависимость от дальности сохраняется.
Разрешающая способность у РЛС этого типа была увеличена примерно в 10 раз по сравнению с панорамными РЛС кругового обзора. И все же эти станции по своим возможностям еще существенно уступают оптическим устройствам.
Вторым, более кардинальным путем является создание радиолокаторов с синтезированием апертуры (РСА) при поступательном движении летательного аппарата.
Огромный вклад в развитие теории РСА внесли известные отечественные ученые А. П. Реутов, Г. С. Кондратенков, П. И. Дудник, Ю. Л. Феоктистов, Н. И. Буренин, Ю. А. Мельник, В. А. Поте-хин и др.
Радиолокаторы с синтезированием апертуры
Сущность метода заключается в излучении РЛС, установленной на подвижном носителе (самолете, космическом аппарате (КА) или беспилотном летательном аппарате), когерентных зондирующих сигналов, приеме соответствующих отраженных сигналов вдоль прямолинейной траектории полета носителя, их запоминании и сложении. В результате сложения принимаемых
сигналов осуществляется сжатие антенного луча и существенно повышается разрешающая способность РЛС вдоль линии пути носителя.
В зависимости от того, компенсируются или нет фазовые набеги при суммировании сигналов, различают фокусированные и несфокусированные РСА. В первом случае обработка сводится к перемещению антенны, запоминанию сигналов, компенсации фазовых набегов и суммированию сигналов, во втором - к тем же операциям, но без компенсации фазовых набегов.
Потенциальная разрешающая способность таких станций приближается к характеристикам оптических средств наблюдения. Эти РЛС дают возможность реализовать высокую линейную разрешающую способность, независимую от дальности наблюдения и длины волны зондирующего сигнала.
В настоящее время существуют три основных режима съемки земной поверхности (рис. 2): маршрутный, обзорный и прожекторный (детальный) .
Современные системы позволяют получать снимки земной поверхности и расположенных на ней объектов с разрешениями порядка 1 м для обзорного и 0,3 м для прожекторного режимов. Существенное влияние на результирующие характеристики РСА оказывают применяемые методы цифровой обработки принятого сигнала .
В маршрутном режиме съемка земной поверхности производится непрерывно в полосе захвата. Сигнал накапливается в течение времени, равного расчетному интервалу синтезирования апертуры антенны для данных условий полета носителя РЛС.
Обзорный режим съемки отличается от маршрутного тем, что съемка непрерывно ведется на всей ширине полосы обзора полосами, равными ширине полосы захвата. Шесть лучей последовательно переключаются по углу места для просмотра всей полосы обзора (рис. 3).
Разделяют боковой и переднебоковой режим в зависимости от ориентации главного лепестка
Прожекторный
ДН антенны. Накопление сигнала осуществляется в течение времени, равного расчетному интервалу синтезирования апертуры антенны для данных условий полета носителя РЛС.
При съемке в прожекторном режиме накопление сигнала происходит на увеличенном, по сравнению с обзорным режимом, интервале. Расширение интервала достигается перемещением главного лепестка ДН антенны, а облучаемый участок постоянно находится в зоне съемки. Это перемещение синхронизировано с движением носителя РЛС.
Для удержания пятна ДН на одном и том же участке поверхности четыре луча последовательно переключаются по азимуту (рис. 4).
Таким образом, анализ основных режимов съемки земной поверхности методом РСА показывает, что:
1) при методе бокового обзора максимальная ширина полосы просматриваемой подстилающей поверхности аналогична ширине просмотра;
2) увеличение линейной разрешающей способности в прожекторном режиме достигается увеличением апертуры, при этом просматриваемая полоса сужается;
3) увеличение линейной разрешающей способности в обзорном режиме осуществляется применением совокупности узконаправленных ДН.
Минимальная линейная разрешающая способность по азимуту 8хш1п для антенн с несфокусированным искусственным раскрывом определяется соотношением
Линейное разрешение по азимуту РЛС с фокусированным искусственным раскрывом определяется выражением
5х - ©Я0 - ^,
где йа - размер раскрыва антенны в заданной плоскости.
Радиолокационная станция с фокусированным искусственным раскрывом позволяет получить, в отличие от несфокусированного, линейное разрешение по азимуту, не зависящее от дальности и длины волны зондирующего сигнала. Разрешающая способность таких РЛС увеличивается с уменьшением размера реальной антенны. Это является существенным преимуществом РСА по сравнению с другими методами зондирования земной поверхности.
Радиолокаторы бокового обзора. Основные соотношения
Определение местоположения цели при боковом обзоре производится в системе координат: путевая дальность х, наклонная дальность Я.
При боковом обзоре ДН антенны перпендикулярна вектору путевой скорости носителя. Определение положения целей на местности осуществляется в прямоугольной системе координат хЯ. Зона обзора представляет собой полосу, параллельную траектории полета носителей (рис. 5, а). Ширина полосы определяется дальностью действия РЛС.
Возможна ориентация ДН антенны под углом к вектору путевой скорости, отличном от л/2.
■ Рис. 4. Прожекторный режим
■ Рис. 5. Схема бокового обзора в прямоугольной (а) и косоугольной (б) системе координат
При этом сужается зона обзора, цели могут обнаруживаться с упреждением (рис. 5, б). В этом случае обзор местности осуществляется в косоугольной системе координат.
Известно, что разрешающая способность РЛС обзора земной поверхности по горизонтальной дальности непосредственно под носителем ухудшается по сравнению с предельной, определяемой длительностью зондирующего импульса . Поэтому за ближайшую границу полосы обзора, где разрешающая способность по дальности ухудшается несущественно, обычно принимают высоту полета носителя.
Метод описывается следующими характеристиками:
Временем облучения;
Дальностью радиолокационного обнаружения;
Разрешающей способностью.
Время облучения
Ттйё _ Щ ’
где © - угловая ширина ДН антенны РЛС в горизонтальной плоскости; W - проекция скорости по направлению пути.
Характерной чертой метода бокового обзора является одноразовое облучение целей. При направлении наблюдения, перпендикулярном вектору путевой скорости, изображение формируется только на траверзе траектории полета.
Второй чертой является увеличение времени облучения цели пропорционально дальности. Это приводит к тому, что энергия отраженных от целей сигналов возрастает с увеличением дальности цели.
Определим дальность радиолокационного обнаружения для случая бокового обзора.
Известно, что дальность обнаружения цели (фона местности) Д0 с эффективной отражающей поверхностью ст при использовании одной приемопередающей антенны имеет вид
64л к0кГоц
где Э - энергия облучения цели; в - коэффициент направленного действия антенны; X - длина волны передатчика РЛС; £ш - коэффициент шума приемного устройства; £ - постоянная Больцмана; Т0 - абсолютная температура (обычно 280 К); "Л = Эс тт/^ш - требуемое значение коэффициента различимости приемного устройства РЛС. Здесь Эс т1п - пороговое значение энергии принимаемого отраженного сигнала, характеризующее чувствительность приемного устройства РЛС; Ыш - спектральная плотность шума на входе приемника: Ыш = £ш£Т0.
Энергия облучения цели (элемента местности) определяется соотношением
V - £Пэ^таё>
где Рср - средняя мощность излучаемого сигнала.
С учетом соотношения для энергии облучения цели получаем формулу для дальности в методе бокового обзора
Рпа©0С2стХ2
64л 1Ак0к7О"п
Анализ выражения показывает наличие возможности увеличить радиус дальности действия рассмотренного метода по сравнению с круговым обзором.
РЛС кругового обзора с синтезированием апертуры на базе КА со стабилизацией вращением. Основные соотношения
Для реализации такого метода просмотра земной поверхности необходимы КА со стабилизацией вращением, РЛС с параболической антенной. ДН антенны имеет относительно местной вертикали угол наклона.
Антенна РЛС за счет кругового вращения корпуса КА, к которому она жестко прикреплена, сканирует подстилающую земную поверхность. Вид проекции ДН антенны в азимутальной и угломестной плоскости на земную поверхность представлен на рис. 6 и 7.
Энергетика РЛС в методе лучше по сравнению с РСА, так как используется более узкая ДН смещенной антенны. Она определяется выбором минимального и максимального угла места наклона ДН антенны.
Рассмотрим положение антенны РЛС в различные моменты времени (рис. 8). Антенна при
Проекция ДН антенны
■ Рис. 6. Вид проекций ДН антенны РЛС на земную поверхность в азимутальной плоскости: Оа - угловая скорость вращения антенны РЛС КА в азимутальной плоскости; Ятах - максимальное расстояние до цели Ц^ V - скорость движения КА
■ Рис. 7. Просмотр полосы обзора антенной РЛС КА
■ Рис. 8. Положения антенны РЛС КА в плоскости вращения в различные моменты времени с учетом поступательного движения и вращения: I - расстояние, которое пролетает КА за полпериода вращения
вращении вокруг местной вертикали с учетом путевой скорости последовательно занимает эти положения (точки 1, 2, 3 и т. д.). Радиус вращения антенны незначителен (порядка нескольких метров). КА движется с первой космической скоростью, и кривая движения антенны превращается практически в прямую за временной промежуток, равный половине периода вращения.
В каждой точке этой кривой электрическая ось антенны будет перпендикулярна к ней. Появляется возможность синтезировать искусственную апертуру.
Местоположение определяется в полярной системе координат. Измеряются дальность R и азимут ß. Высота полета H и угол места у определяются. Азимут цели отсчитывается от направления движения (см. рис. 6).
Радиолокационное наблюдение производят в определенной области пространства, которая называется рабочей зоной, или зоной обзора РЛС. Размеры рабочей зоны определяются интервалами обзора по дальности Rmax - Rmin, азимуту «max - amin, углу места ßmax - ßmin и радиальной скорости Vr max - Vr min. Протяженность каждого указанного интервала определяется числом содержащихся в нем элементов разрешения РЛС по соответствующей координате.
Информацию о наличии целей в различных элементах разрешения рабочей зоны получают в процессе обзора (просмотра) этих элементов. Очередность и время просмотра различных элементов, а также интенсивность сигналов, излучаемых РЛС при просмотре каждого элемента, определяются используемым способом (программой) обзора рабочей зоны.
Обзор элементов рабочей зоны может производиться последовательно во времени или одновременно.
При последовательном обзоре не всегда может быть обеспечен необходимый темп получения информации о наличии и координатах целей в зоне обзора. Это связано с тем, что время облучения цели Т должно превышать максимальное время запаздывания сигнала ттах:
Т> "^шах 2^шах / с
где Ятах - максимальная дальность действия РЛС; с - скорость света.
Время однократного обзора всей зоны Т0 должно удовлетворять условию
Т0 - Т^а, р > (2^Шах / с)^а, р,
где Ыа р - число элементов разрешения по направлению.
При круговом обзоре с синтезированием апертуры должно выполняться определенное соотношение
Т - 2л / Оа.
Число импульсов, отраженных целью за это время, составит
П - Щ - ©Гё / Оа,
где - частота следования импульсов в пачке.
Период обзора рабочей зоны определяет темп поступления информации о наличии цели в зоне и не может превышать некоторого допустимого значения Т0 тах. Если эта величина задана, то
Оа - 2л / ^Ошах.
Это соотношение определяет минимальную угловую скорость вращения ДН антенны РЛС при круговом обзоре с синтезированием апертуры.
Выбором скорости вращения добиваются просмотра земной поверхности без пропусков.
Основные характеристики метода кругового обзора с синтезированием апертуры:
Время облучения цели;
Период обзора и число циклов обзора, приходящихся на каждую цель.
Сравнение метода кругового обзора с синтезированием апертуры с другими методами позволяет сделать следующие выводы.
1. Сканированием ДН приемной антенны обеспечивается просмотр всей подстилающей зем-
ной поверхности без пропусков. При этом угловая разрешающая способность получаемого изображения будет сопоставима с разрешающей способностью РСА в прожекторном режиме.
2. Время облучения практически не зависит от дальности цели.
3. Просмотр подстилающей земной поверхности за один период вращения происходит дважды и зависит от угловой скорости, определяющей количество циклов.
4. Энергетика РЛС значительно выше по сравнению с методом РСА, так как используется более узкая ДН. Цель (элемент местности) находится на направлении наблюдения, перпендикулярном вектору угловой скорости.
5. Выбором угла наклона антенны исключается обзор земной поверхности по горизонтальной
1. Соллогуб А. В. и др. Оценка эффективности кластера малых космических аппаратов дистанционного зондирования Земли по показателям оперативности и надежности выполнения функциональных задач // Информационно-управляющие системы. 2012. № 5(60). С. 24-28.
2. Верба В. С., Неронский Л. Б., Осипов И. Г., Турук В. Э. Радиолокационные системы землеобзора космического базирования / под ред. В. С. Вербы. - М.: Радиотехника, 2010. - 680 с.
3. Виноградов М. Возможности современных РЛС с синтезированием апертуры антенны // Зарубежное военное обозрение. 2009. № 2. С. 52-56.
дальности непосредственно под носителем, где разрешающая способность РЛС крайне низкая.
Заключение
В данной работе рассмотрены основные направления развития радиолокационных систем контроля земной поверхности космического базирования и история создания этих средств. Проанализированы существующие методы, выполнена сравнительная оценка основных технических характеристик. Предложен метод синтезирования апертуры на основе кругового перемещения приемной антенны с использованием КА со стабилизацией вращением. Определены пути улучшения технических характеристик бортового радиолокатора для решения прикладных задач.
4. Сесин А. Е., Шепета Д. А. Математическая модель эхо-сигналов морской поверхности, наблюдаемых бортовыми локаторами летательных аппаратов // Информационно-управляющие системы. 2010. № 2. С. 21-25.
5. Захарова Л. Н. и др. Совместный анализ данных оптических и радиолокационных сенсоров: возможности, ограничения и перспективы // Радиотехника и электроника. 2011. Т. 56. № 1. С. 5-19.
Одним из важных направлений использования РЛС является их применение на борту летательного аппарата, осуществляющих обзор земной поверхности. В зависимости от решаемых задач, требуемой величины зоны обзора и время обзора различают следующие виды обзора:
· полосовой обзор (переднебоковой обзор);
· секторный обзор;
· телескопический обзор.
Возможны и другие виды обзора, которые являются либо частными случаями вышеперечисленных обзоров, либо их комбинациями.
Мерой углового положения излучающего объекта и параметром, позволяющим измерить угловые координаты и обеспечить разрешение по углу, является частота Доплера. Благоприятные условия для решения этих задач создаются при условии бокового обзора земной поверхности летательного аппарата, выдерживающего курс, частоту и скорость.
Детальность радиолокационного изображения земной поверхности зависит от разрешающей способности в поперечном по отношению к РЛС направлению, а так же от разрешающей способности вдоль линии пути.
Разрешающая способность в поперечном направлении (тангенциальная разрешающая способность) зависит от полосы зондирующих сигналов и угла места объектов в поперечной плоскости.
Разрешающая способность вдоль линии пути различна при некогерентной и когерентной обработке. В первом случае она определяется шириной диаграммы направленности, соответствующей раскрыву размещенной на летательном аппарате антенны. При когерентной обработке, она может быть существенно увеличена соответственно синтезированному раскрыву, определяемому величиной перемещения летательного аппарата за время обработки.
При построении радиолокаторов с синтезированной аппаратурой на борту летательного аппарата устанавливаются слабонаправленная антенна, осуществляющая боковой обзор пространства (рис.6.1). Сигналы, принятые от различных точек траектории запоминаются и обрабатываются, как в антенной решетке, где они складываются синфазно, образуя максимум амплитуды суммарного сигнала.

Синтезированная антенна образуется перемещением одного элемента, ось диаграммы направленности которого ориентирована перпендикулярно прямолинейной траектории полета (рис.6.2).
При использовании импульсных сигналов они принимаются и запоминаются в точках траектории, отстоящих друг относительно друга на расстоянии где - скорость полета; - период повторения импульсов. Далее сигналы суммируются в схеме, изображенной на рис.2. Расстояние , на котором происходит суммирование, представляет собой апертуру синтезированной антенны (рис.6.3).

Суммирование сигналов осуществляется в линии задержки ЛЗ. Различают нефокусированные (рис.6.4.) и фокусированные синтезируемые антенны. Особенностью нефокусированной антенны является суммирование принимаемых сигналов несинфазно. Эквивалентная длинна ограничивается возможностью суммирования сигналов приблизительно в фазе, то есть когда разность расстояний от РЛС до цели не превосходит λ/8 (рис 6.5).
Ввиду малости второго слагаемого, получим
Ширина диаграммы направленности такой антенны
![]() (6.3)
(6.3)
В этом случае тангенциальная разрешающая способность
![]() (6.4)
(6.4)
улучшилась по сравнению с панорамной антенной
где - разрешающая способность по азимуту.
Теперь пропорциональна не R, а .

В фокусированных антеннах в антеннах в цепь элементов решетки вводятся фазовые сдвиги для компенсации перемещения РЛС относительно цели (рис.6.6).

Размер реальной антенны в горизонтальной плоскости равен L, ширина ее диаграммы
Длинна синтезированной антенны равна протяженности траектории полета, на которой РЛС облучает цепь (рис.6.7).
Ширина диаграммы направленности антенны равна
![]() .
.
Тангенциальная разрешающая способность
![]() . (6.7)
. (6.7)
Не зависит от дальности и равна половине размера реальной антенны.
Традиционным путем РЛС с синтезированной антенной построить невозможно так как требуется значительные: длина фокусированной антенны (сотни м); задержка сигналов в линии задержки (десятки с); число суммируемых импульсов (десятки тысяч).
На практике для построения РЛС с синтезированной антенной используется эффект Доплера и согласованная фильтрация. Информация о частоте Доплера используется как мера углового положения. Пусть вдоль прямой х, параллельной линии пути летательного аппарата, лежащей в полосе бокового обзора, расположены излучатели А непрерывных монохромических колебаний частоты f 0 (рис 6.8).

В каждый момент времени излучаемые колебания можно различать по частоте Доплера
![]() . (6.8)
. (6.8)
Если оценивать изменения во времени расстояния от приемника до точки А, можно определить закон модуляции сигналов
где - момент времени, когда приемник находиться на кратчайшем расстоянии r 0 от точки А. Квадратному изменению времени запаздывания соответствует линейное изменение мгновенной частоты
![]() (6.10)
(6.10)
Таким образом принимаемый сигнал оказывается частотно-модулированным. При обработке в оптимальном фильтре, согласованном с ожидаемым частотно-модулированным сигналом наблюдается сжатие сигнала. Длительность сжатого сигнала равна
![]() (6.11)
(6.11)
где - длительность импульсной характеристики фильтра. Аналогичный сжаты импульс будет получен, и для сигнала, приходящий от любой другой точки А; временной интервал между этими импульсами будет = где - скорость движения цели. Минимально разрешаемый временной интервал определяется длительностью сжатого импульса
Отношение / = можно рассматривать как меру синтезированного углового разрешения
![]() (6.13)
(6.13)
где = - размер эквивалентного синтезированного раскрыва, образованного при перемещении точки приема за длительность когерентного накопления . Сжатие позволяет получить разрешающую способность как у фокусированной антенны.
Для обеспечения разрешающей способности по дальности необходимо использовать импульсное излучение, причем импульсы должны быть когерентны между собой.
Таким образом, РЛС с синтезированной апертурой должна содержать
1. когерентно - импульсную РЛС с истинной когерентностью;
2. систему обработки сигналов, которая должна производить оптимальную обработку по азимуту (согласованную фильтрацию) в каждом элементе разрешению по дальности.
Один из вариантов такого локатора изображен на рис.6.9.
Могут применятся и другие схемы, однако сигналы должны быть когерентны (например вырезка из одного и того же гармонического колебания).
Выходным элементом приемника когерентно- импульсной РЛС является фазовый детектор, выходное напряжение которого определяется следующим образом
где , - амплитуды напряжений когерентного гетеродина и выходного сигнала;
Начальные фазы колебаний;
Доплеровское смещение частот.

Сигнал от точечной цели на выходе фазового детектора представляет собой импульсную последовательность с огибающей, повторяющей квадрат диаграммы направленности реальной антенны, и амплитудной модуляцией частотой Доплера (рис.6.10) Если в течении периода повторения Т п будет несколько целей, то согласованная фильтрация проводиться по каждой из них.

Существуют следующие способы построения соответствующей аппаратуры:
1. Запись сигналов с фазового детектора на фотопленку с последующей оптической обработкой.
2. Цифровая обработка сигналов.
В основу цифровой обработки положено оптимальное обнаружение пачки радиоимпульсов со случайной начальной фазой. Оптимальная обработка сводится к вычислению модуля корреляционного интеграла. Но так как сигнал не непрерывный, а дискретный, то вычисляется не интеграл, а сумма
где - выработка входного сигнала;
– опорная функция;
n – номер отсчета сигнала изображения;
k – номер отсчета опорной функции;
N – число дискретных значений опорной функции.
В случае цифровой обработки структурной схемы приемника имеет вид, изображенный на рис. 6.11.

Для нахождения действительной и мнимой частей представления входного сигнала устройство обработки строится с квадратурными каналами (рис.6.12). На рис. 6.13 изображена структура цифровой обработки в одном элементе разрешения.

В схеме выполняются операции, предусмотренные согласно формуле для S вых (n): находятся действительные и мнимые части произведения под знаком суммы для каждого из N значений опорной функции и суммируются.

Синтезирование апертуры антенны является одним из наиболее перспективных направлений развития радиолокации, появившееся в конце 50-х годов и сразу привлекшее к себе широкое внимание. Основным преимуществом этого направления является многократное (в 1000 и более раз) увеличение угловой разрешающей способности РЛС. При этом обеспечивается возможность радиовидения объектов радиолокации и обнаружения малоразмерных объектов, повышение точности целеуказания и помехозащищенности РЛС. На первом этапе развития этого направления основные успехи были достигнуты в значительном повышении эффективности воздушной и космической разведки. В дальнейшем методы синтезирования апертуры начали использоваться в разведывательно-ударных комплексах, многофункциональных РЛС самолетов для обнаружения малоразмерных и групповых целей и наведения на них управляемого оружия, в РЛС планового обзора, системах радиотехнической разведки и навигации.
В развитии теории и практики от радиолокации к радиовидению было два этапа.
На первом этапе благодаря использованию широкополосных (100 МГц и более) зондирующих сигналов удалось обеспечить высокое разрешение по задержке сигналов и как следствие высокое разрешение по дальности (единицы метров и лучше). Разрешение по дальности определяется выражением
Ширина спектра зондирующего сигнала.
![]() - длина волны РЛС; с 1 - размер антенны,
- длина волны РЛС; с 1 - размер антенны,
![]()

Формирование ДН реальной антенны. Для пояснения принципа синтезирования апертуры вначале рассмотрим формирование диаграммы направленности реальной антенны, которая и определяет разрешающую способность по угловой координате обычной РЛС.
Пусть имеется линейная апертура антенны размером d, на которую падает плоская электромагнитная волна под углом 0 (рис. 2.1), т.е. антенна работает на прием.
Под апертурой (раскрывом) понимается та часть антенны, которая участвует в излучении или приеме электромагнитной волны. Фронт волны - это поверхность равных фаз. В рассматриваемом случае это плоскость. Фаза электромагнитной волны вдоль апертуры (ось X) определяется запаздыванием фронта волны относительно центра апертуры:

где г(х) - расстояние от фронта волны до точки х на апертуре.
Диаграмма направленности формируется в результате синфазного суммирования электромагнитной волны, падающей на апертуру:

Напряженность электромагнитной волны.
Нормированная диаграмма направленности в этом случае равна

на уровне 0,7 или, что то же, 0,5 по мощности:
![]()
При работе одной антенны не только на прием, но и на передачу ДН определяется как

а эквивалентная ширина ДН на передачу и прием
![]()
![]()
![]()
В более общем случае апертура антенны задает объем анализируемого пространственно-временного сигнала, который представляет собой зависимость напряженности, фазы и поляризации электромагнитного поля от пространственных координат и времени. Таким образом, апертура характеризуется геометрическими размерами анализируемого объема электромагнитной волны, временем анализа, поляризационными и частотными параметрами. В этом случае разрешающая способность по угловой координате определяется изменением пространственно-временного сигнала в апертуре антенны в зависимости от углового положения источника электромагнитной волны.
Известными примерами такого пространственно-временного сигнала могут служить объемные голографические линзы и синтезированные апертуры.

Синтезирование апертуры. Основное отличие синтезированных (искусственных) апертур от обычных (реальных) апертур антенны состоит в том, что синтезированная апертура (СА) формируется последовательно во времени. В каждый данный момент прием электромагнитной волны ведется реальной апертурой, а синтезированная апертура является результатом последовательного во времени приема электромагнитной волны реальной апертурой при различном ее положении относительно источника электромагнитной волны. Рассмотрим процесс синтезирования на примере формирования прямолинейной апертуры РСА (рис. 2.2).
Ее диаграмма направленности на прием определяется так же, как и ДН реальной апертуры. Набег фазы волны между двумя положениями реальной антенны на траектории

в два раза больше, чем у обычной апертуры, что обусловлено двойным проходом электромагнитной волной расстояния г (при передаче и при приеме). В результате ширина диаграммы направленности у синтезированной апертуры РСА такого типа оказывается меньше, чем у реальной апертуры такого же размера:

Главный результат синтезирования апертуры в том, что размер апертуры увеличился в N раз по сравнению с размером реальной апертуры.
синтезированной апертуры, сформированной в результате
перемещения реальной антенны. В данном случае эффект достигается увеличением объема анализируемого поля в пространстве и времени.
Основные свойства синтезированной апертуры. Рассмотрим основные свойства синтезированной апертуры.
для бортовых самолетных и космических систем. Типовые значения относительных размеров апертур различных систем следующие:
Благодаря большому размеру апертуры РСА возможно получение высокого линейного разрешения по угловой координате на больших дальностях:

Синтезированная апертура формируется в результате приема и обработки отраженных от цели сигналов, т.е. синтезированная апертура определяет ДН только на прием. ДН на передачу при синтезировании апертуры определяется ДН реальной антенны. Поляризационные и частотные свойства СА также определяются реальной антенной.
При синтезировании апертуры одновременно может работать (излучать, принимать) всего один антенный элемент (реальная антенна). В этом случае не возникает электродинамических задач при формировании всей апертуры, так как нет взаимодействия элементов по электромагнитному полю. Задача синтезирования апертуры и формирования диаграммы направленности фактически сводится к разработке алгоритмов и их выполнению процессором обработки траекторного сигнала. Как и для реальной антенны, ДН синтезированной апертуры есть зависимость сигнала на выходе процессора от угловой координаты точечного источника излучения или переизлучения (в случае активной РСА).
ДН может быть однолучевой, многолучевой, моноимпульсной, адаптивной и т.п.
объекты наблюдения РСА в большинстве случаев находятся в промежуточной зоне (зоне Френеля) апертуры, а не в дальней зоне, как у большинства реальных антенн. При приеме в дальней зоне фронт волны на апертуре считается плоским. С увеличением размера апертуры (или уменьшением расстояния до объекта) сферичностью фронта волны уже пренебрегать нельзя. Обычно условие дальней зоны записывается как
![]()
Для реальной антенны бортовой РЛС граница дальней зоны порядка 100 м, а при синтезировании она исчисляется тысячами километров. Поэтому в РСА при обработке траекторного сигнала необходимо учитывать сферичность фазового фронта электромагнитной волны. В простейших РСА, когда размер СА небольшой, кривизну фронта электромагнитной волны не учитывают. Такой режим называют доплеровским обужением луча (ДОЛ), и увеличение разрешения при этом невелико (10...30) раз.
Учет сферичности фронта волны при обработке траекторного сигнала называют фокусировкой, а апертуру соответственно фокусированной апертурой. На рис. 2.3 показано распределение поля нефокусированной (ДОЛ) (а) и фокусированной (б) апертур в промежуточной и дальней зонах ДН.

На расстоянии фокусирования, т.е. такое же, как и у обычной антенны в дальней зоне. Можно сказать, что процесс фокусирования переносит свойства направленности апертуры из дальней зоны в промежуточную.
Так как сферичность фронта волны зависит от расстояния до объекта, необходим различный закон фокусирования для разных дальностей, т.е. для обеспечения фокусировки СА нужен многоканальный по дальности алгоритм обработки траекторного сигнала.
Благодаря фокусировке СА обеспечивает в промежуточной зоне разрешение не только по углу, но и по дальности даже при смодулированном сигнале. Однако обычно оно невелико, и разрешение по дальности обеспечивается за счет модуляции зондирующего сигнала.
Основными источниками ошибок - некогерентности траекторного сигнала - являются фазовые нестабильности приемопередающих модулей, траекторные нестабильности носителя РСА и нестабильности среды распространения электромагнитной волны. Так, допустимая ошибка в знании траектории перемещения антенны равна нескольким миллиметрам (в сантиметровом диапазоне электромагнитной волны). Это требует специальных мер компенсации этих ошибок с помощью систем микронавигации и алгоритмов автофокусировки.
Энергетические характеристики СА (отношение сигнал/внутрен ний шум) определяются коэффициентом усиления реальной антенны и временем синтезирования, т.е. временем когерентного накопления сиг налов. Помехозащищенность от внешних активных и пассивных помех определяется как ДН реальной антенны, так и направленными свойствами СА, т.е. пространственной селекцией помех.
Действительно, в каждом положении антенны при синтезировании апертуры мощность принятого сигнала определяется мощностью излучения и коэффициентом усиления антенны, а синфазное сложение этих сигналов при синтезировании эквивалентно накоплению энергии сигнала за время синтезирования при постоянной спектральной мощности внутренних шумов. По отношению к источникам внешних помех, кроме того, возможна угловая селекция, эффективность которой зависит от ДН реальной и синтезированной апертур.
Относительное перемещение антенны и объекта, необходимое для формирования СА, можно выполнить различными методами. Фор мирование СА в результате движения антенны при неподвижном объек те называют прямым синтезированием, а формирование СА при движе нии объекта и неподвижной антенне - обратным синтезированием. При этом возможно формирование СА в результате вращения объекта, что эквивалентно движению антенны вокруг объекта.
Использование в процессе синтезирования одновременно не одной, а многих антенн позволяет синтезировать не только линейные, но и плоские и объемные СА.
![]() что представляет исключительно сложную задачу для бортовых ЦВМ. В наземных условиях эту задачу успешно решает оптический процессор, в котором используется запись траекторного сигнала на фотопленку и аналоговая обработка сигнала с помощью когерентной оптической системы.
что представляет исключительно сложную задачу для бортовых ЦВМ. В наземных условиях эту задачу успешно решает оптический процессор, в котором используется запись траекторного сигнала на фотопленку и аналоговая обработка сигнала с помощью когерентной оптической системы.
Синтезирование апертуры требует определенного времени, что приводит к задержке информации в РСА. Минимальное запаздывание информации определяется временем синтезирования, т.е. временем формирования СА. Обычно оно составляет десятые доли - единицы секунд. Максимальная задержка определяется с учетом времени выполнения алгоритма синтезирования соответствующим процессором обработки тра-екторных сигналов. Наибольшую задержку имеют наземные оптические процессоры. Она состоит из времени полета самолета в зоне работы РСА, времени возвращения на базу, времени доставки фотопленки с записью траекторных сигналов в лабораторию, времени фотохимической обработки пленки, оптической обработки и записи изображения на вторичную фотопленку и, наконец, фотохимической обработки вторичной пленки. Это время может достигать нескольких часов.
Капитан М. Виноградов,
кандидат технических наук
Современные радиолокационные средства, устанавливаемые на самолетах и космических аппаратах, в настоящее время представляют один из наиболее интенсивно развивающихся сегментов радиоэлектронной техники. Идентичность физических принципов, лежащих в основе построения этих средств, делает возможным рассмотрение их в рамках одной статьи. Основные различия между космическими и авиационными РЛС заключаются в принципах обработки радиолокационного сигнала, связанными с различным размером апертуры, особенностями распространения радиолокационных сигналов в различных слоях атмосферы, необходимостью учета кривизны земной поверхности и т. д. Несмотря на подобного рода различия, разработчики РЛС с синтезированием апертуры (РСА) прилагают все усилия для того, чтобы добиться максимальной схожести возможностей данных средств разведки.
В настоящее время бортовые РЛС с синтезированием апертуры позволяют решать задачи видовой разведки (вести съемку земной поверхности в различных режимах), селекции мобильных и стационарных целей, анализа изменений наземной обстановки, осуществлять съемку объектов, скрытых в лесных массивах, обнаружение заглубленных и малоразмерных морских объектов.
Основным назначением РСА является детальная съемка земной поверхности.

|
|
| Рис. 1. Режимы съемки современных РСА (а — детальный, б - обзорный, в - сканирующий) | Рис. 2. Примеры реальных радиолокационных изображений с разрешениями 0,3 м (вверху) и 0,1 м (внизу) |
|
|
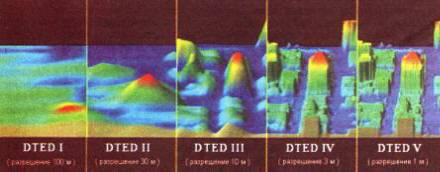
| Рис. 3. Вид изображений при разных уровнях детализации | |

|
|
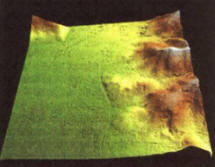
| Рис. 4. Примеры фрагментов реальных участков земной поверхности, полученных при уровнях детализации DTED2 (слева) и DTED4 (справа) | |
За счет искусственного увеличения апертуры бортовой антенны, основной принцип которого заключается в когерентном накоплении отраженных радиолокационных сигналов на интервале синтезирования, удается получить высокое разрешение по углу. В современных системах разрешение может достигать десятков сантиметров при работе в сантиметровом диапазоне длин волн. Аналогичные значения разрешения по дальности достигаются за счет применения внутриимпульсной модуляции, например, линейно-частотной модуляции (ЛЧМ). Интервал синтезирования апертуры антенны прямо пропорционален высоте полета носителя РСА, что обеспечивает независимость разрешения съемки от высоты.
В настоящее время существуют три основных режима съемки земной поверхности: обзорный, сканирующий и детальный (рис. 1). В обзорном режиме съемка земной поверхности осуществляется непрерывно в полосе захвата, при этом разделяют боковой и переднебоковой режим (в зависимости от ориентации главного лепестка диаграммы направленности антенны). Накопление сигнала осуществляется в течение времени, равного расчетному интервалу синтезирования апертуры антенны для данных условий полета носителя РЛС. Сканирующий режим съемки отличается от обзорного тем, что съемка ведется на всей ширине полосы обзора, полосами равными ширине полосы захвата. Данный режим используется исключительно в РЛС космического базирования. При съемке в детальном режиме накопление сигнала осуществляется на увеличенном по сравнению с обзорным режимом интервале. Увеличение интервала осуществляется за счет синхронного с движением носителя РЛС перемещения главного лепестка диаграммы направленности антенны таким образом, чтобы облучаемый участок постоянно находился в зоне съемки. Современные системы позволяют получать снимки земной поверхности и расположенных на ней объектов с разрешениями порядка 1 м для обзорного и 0,3 м для детального режимов. Компания «Сандия» анонсировала создание РСА для тактических БЛА, имеющего возможность вести съемку с разрешением 0,1 м в детальном режиме. Существенное значение на результирующие характеристики РСА (в плане съемки земной поверхности) оказывают применяемые методы цифровой обработки принятого сигнала, важной составляющей которых являются адаптивные алгоритмы коррекции траекторных искажений. Именно невозможность выдерживать в течение длительного времени прямолинейную траекторию движения носителя не позволяет получать в непрерывном обзорном режиме съемки разрешения сопоставимые с детальным режимом, хотя никаких физических ограничений на разрешение в обзорном режиме не существует.
Режим инверсного синтезирования апертуры (ИРСА) позволяет осуществлять синтезирование апертуры антенны не за счет движения носителя, а за счет движения облучаемой цели. При этом речь может идти не о поступательном движении, характерном для наземных объектов, а о маятниковом движении (в разных плоскостях), характерном для плавучих средств, раскачивающихся на волнах. Данная возможность определяет основное назначение ИРСА - обнаружение и идентификация морских объектов. Характеристики современных ИРСА позволяют уверенно обнаруживать даже малоразмерные объекты, такие как перископы подводных лодок. Вести съемку в данном режиме имеют возможность все самолеты, состоящие на вооружении ВС США и других государств, в задачи которых входит патрулирование береговой зоны и акваторий. Получаемые в результате съемки изображения по своим характеристикам аналогичны изображениям, получаемым в результате съемки с прямым (неинверсным) синтезированием апертуры.
Режим интерферометрической съемки (Interferometric SAR - IFSAR) позволяет получать трехмерные изображения земной поверхности. При этом современные системы имеют возможность вести одноточечную съемку (то есть использовать одну антенну) для получения трехмерных изображений. Для характеристики данных изображений помимо обычного разрешения вводится дополнительный параметр, называемый точность определения высоты, или разрешение по высоте. В зависимости от значения данного параметра определяют несколько стандартных градаций трехмерных изображений (DTED - Digital Terrain Elevation Data):
DTEDO.............................. 900 м
DTED1.............................. 90m
DTED2............................ 30m
DTED3.............................. 10m
DTED4............................ Зм
DTED5.............................. 1m
Вид изображений урбанизированной территории (модель), соответствующий различным уровням детализации, представлен на рис. 3.
Уровни 3-5 получили официальное название «данных с высоким разрешением» (HRTe-High Resolution Terrain Elevation data). Определение местоположения наземных объектов на изображениях уровня 0-2 ведется в системе координат WGS 84, отсчет высоты осуществляется относительно нулевой отметки. Система координат изображений с высоким разрешением в настоящий момент не стандартизирована и находится на стадии обсуждения. На рис. 4 представлены фрагменты реальных участков земной поверхности, полученные в результате стереосъемки с различным разрешением.
В 2000 году американский МТКК «Шаттл» в рамках проекта SRTM (Shuttle Radar Topography Mission), целью которого являлось получение картографической информации крупных масштабов, выполнил интерферометрическую съемку экваториальной части Земли в полосе от 60° с. ш. до 56° ю. ш., получив на выходе трехмерную модель земной поверхности в формате DTED2. Для получения детальных трехмерных данных в США разрабатывается проект NGA HRTe? в рамках которого будут доступны изображения уровней 3-5.
Помимо радиолокационной съемки открытых участков земной поверхности, бортовая РЛС имеет возможность получать изображения сцен, скрытых от глаз наблюдателя. В частности, она позволяет обнаруживать объекты, скрытые в лесных массивах, а также, находящиеся под землей.
Проникающая РЛС (GPR, Ground Penetrating Radar) - система дистанционного зондирования, принцип действия которой основан на обработке сигналов, отраженных от деформированных или отличающихся по своему составу участков, находящихся в однородном (или относительно однородном) объеме. Система зондирования земной поверхности позволяет обнаруживать находящиеся на различной глубине пустоты, трещины, заглубленные объекты, выявлять участки различной плотности. При этом энергия отраженного сигнала сильно зависит от поглощающих свойств почвы, размеров и формы цели, степени неоднородности граничных областей. В настоящее время GPR помимо военно-прикладной направленности развился в коммерчески выгодную технологию.
Зондирование земной поверхности происходит путем облучения импульсами с частотой 10 МГц - 1,5 ГГц. Облучающая антенна может находиться на земной поверхности или расположена на борту летательного аппарата. Часть энергии облучения отражается от изменений в подповерхностной структуре земли, большая же часть проникает дальше в глубину. Отраженный сигнал принимается, обрабатывается, и результаты обработки отображаются на дисплее. При движении антенны генерируется непрерывное изображение, отражающее состояние подповерхностных слоев почвы. Так как фактически отражение происходит из-за различия ди-электрических проницаемо-стей различных веществ (или разных состояний одного вещества), то зондированием можно выявлять большое количество естественных и искусственных дефектов в однородной массе подповерхностных слоев. Глубина проникновения зависит от состояния почвы на месте облучения. Уменьшение амплитуды сигнала (поглощение или рассеяние) в значительной мере зависит от ряда свойств почвы, основное из которых - ее электропроводность. Так, оптимальными для зондирования являются песчаные почвы. Гораздо менее пригодны для этого глинистые и очень влажные почвы. Хорошие результаты показывает зондирование сухих материалов, таких как гранит, известняк, бетон.
Разрешениепризондированииможетбыть улучшено за счет повышения частоты излучаемых волн. Однако увеличение частоты отрицательно сказывается на глубине проникновения излучения. Так, сигналы с частотой 500-900 МГц могут проникать на глубину 1-3 м и обеспечивают разрешение до 10 см, а с частотой 80-300 МГц проникают на глубину 9-25 м, но разрешение составляет порядка 1,5 м.
Основным военным назначением РЛС подповерхностного зондирования является обнаружение заложенных мин. При этом РЛС, установленная на борту летательного аппарата, например вертолета, позволяет непосредственно вскрывать карты минных полей. На рис. 5 представлены изображения, полученные с помощью РЛС, установленной на борту вертолета, отражающие расположение противопехотных мин.
Бортовая РЛС, предназначенная для обнаружения и слежения за объектами, скрытыми в лесных массивах (FO-PEN - FOliage PENetrating), позволяет обнаруживать малоразмерные объекты (движущиеся и стационарные), скрытые кронами деревьев. Съемка объектов, скрытых в лесных массивах, ведется аналогично обычной съемке в двух режимах: обзорном и детальном. В среднем в обзорном режиме ширина полосы захвата составляет 2 км, что позволяет получать на выходе изображения участков земной поверхности 2x7 км; в детальном режиме съемка осуществляется участками 3х3 км. Разрешение съемки зависит от частоты и варьируется от 10 м при частоте 20-50 МГц до 1 м при частоте 200-500 МГц.
Современные методы анализа изображений позволяют с достаточно высокой вероятностью обнаруживать и производить последующую идентификацию объектов на полученном радиолокационном изображении. При этом обнаружение возможно на снимках как с высоким (менее 1 м), так и с низким (до 10 м) разрешением, в то время как для распознавания требуются изображения с достаточно высоким (порядка 0,5 м) разрешением. И даже в этом случае можно говорить в большей части только о распознавании по косвенным признакам, поскольку геометрическая форма объекта очень сильно искажена из-за наличия сигнала, отраженного от лиственного покрова, а также вследствие появления сигналов со смещением частоты за счет доплеровского эффекта, возникающего в результате колебания листвы на ветру.
На рис. 6 представлены изо-бражения (оптическое и радиолокационное) одного и того же участка местности. Объекты (колонна машин), невидимые на оптическом изображении, хорошо видны на радиолокационном, однако осуществить идентификацию данных объектов, абстрагировавшись от внешних признаков (движение по дороге, расстояние между машинами и т. д.), невозможно, так как при данном разрешении информация о геометрической структуре объекта отсутствует полностью.
Детальность получаемых радиолокационных изображений позволила реализовать на практике еще ряд особенностей, которые, в свою очередь, сделали возможным решение ряда важных практических задач. К одной из таких задач относится отслеживание изменений, произошедших на некотором участке земной поверхности за определенный период времени - когерентное детектирование. Длительность периода обычно определяется периодичностью патрулирования заданного района. Отслеживание изменений осуществляется на основе анализа покоординатно совмещенных изображений заданного района, полученных последовательно друг за другом. При этом возможны два уровня детализации анализа.

|

|
| Рис 5. Карты минных полей в трехмерном представлении при съемке в различных поляризациях: модель (справа), пример изображения реального участка земной поверхности со сложной подповерхностной обстановкой (слева), полученного с помощью РЛС, установленной на борту вертолета | |

|
|
| Рис. 6. Оптическое (вверху) и радиолокационное (внизу) изображения участка местности с движущейся по лесной дороге колонной автомобилей | |

|
|
Первый уровень предполагает обнаружение значительных изменений и основывается на анализе амплитудных отсчетов изображения, несущих основную визуальную информацию. Чаще всего в эту группу относятся изменения, которые сможет увидеть человек, просматривая одновременно два сформированных радиолокационных изображения. Второй уровень базируется на анализе фазовых отсчетов и позволяет выявлять изменения, невидимые человеческому глазу. К таковым можно отнести появление следов (машины или человека) на дороге, изменение состояния окон, дверей («открыто - закрыто») и т. д.
Другой интересной возможностью РСА, также анонсированной компанией «Сандия», является радиолокационная видеосъемка. В данном режиме дискретное формирование апертуры антенны от участка к участку, характерное для непрерывного обзорного режима, заменено на параллельное многоканальное формирование. То есть в каждый момент времени синтезируется не одна, а несколько (количество зависит от решаемых задач) апертур. Своего рода аналогом количества формируемых апертур является частота кадров в обычной видеосъемке. Данная возможность позволяет реализовывать селекцию движущихся целей на базе анализа полученных радиолокационных изображений, применяя принципы когерентного детектирования, что является по своей сути альтернативой стандартным РЛС, осуществляющим селекцию движущихся целей на основе анализа до-плеровских частот в принятом сигнале. Эффективность реализации подобных селекторов движущихся целей весьма сомнительна ввиду значительных аппаратно-программных затрат, поэтому подобные режимы с большой вероятностью так и останутся не более чем изящным способом решения задачи селекции, несмотря на открывающиеся возможности селектировать цели, движущиеся с очень низкими скоростями (менее 3 км/ч, что недоступно доплеровским СДЦ). Непосредственно видеосъемка в радиолокационном диапазоне в настоящее время также не нашла применения, опять же из-за высоких требований к быстродействию, поэтому действующих образцов военной техники, реализующих на практике данный режим, нет.
Логическим продолжением совершенствования техники съемки земной поверхности в радиолокационном диапазоне является развитие подсистем анализа полученной информации. В частности, важное значение приобретает разработка систем автоматического анализа радиолокационных изображений, позволяющих обнаруживать выделять и распознавать наземные объекты, попавшие в зону съемки. Сложность создания подобных систем связана с когерентной природой радиолокационных изображений, явления интерференции и дифракции в которых приводят к появлению артефактов - искусственных бликов, аналогичных тем, которые появляются при облучении цели с большой эффективной поверхностью рассеяния. Кроме того, качество радиолокационного изображения несколько ниже, чем качество аналогичного (по разрешению) оптического изображения. Все это приводит к тому, что эффективных реализаций алгоритмов распознавания объектов на радиолокационных изображениях в настоящее время не существует, но количество работ, проводимых в данной области, определенные успехи, достигнутые в последнее время, позволяют предположить, что в недалеком будущем можно будет вести речь об интеллектуальных беспилотных разведывательных аппаратах, имеющих возможность производить оценку наземной обстановки по результатам анализа информации, полученной собственными бортовыми средствами радиолокационной разведки.
Другим направлением развития является комплексирование, то есть согласованное объединение с последующей совместной обработкой, информации от нескольких источников. Это могут быть РЛС, ведущие съемку в различных режимах, либо РЛС и другие средства разведки (оптические, ИК, многоспектральные и т. п.).
Таким образом, современные РЛС с синтезированием апертуры антенны позволяют решать широкий спектр задач, связанных с ведением радиолокационной съемки земной поверхности независимо от времени суток и погодных условий, что делает их важным средством добывания информации о состоянии земной поверхности и находящихся на ней объектах.
Зарубежное военное обозрение №2 2009 С.52-56
17.РАДИОЛОКАЦИОННЫЕ СТАНЦИИ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕНЫ (РСА)
Радиолокаторы с длинной вдольфюзеляжной антенной позволяют получать детальные радиолокационные изображения только на относительно небольших дальностях. При выносе полосы разведки на десятки километров от самолета необходимо использовать антенны длиной в десятки и сотни метров, размещение которых на самолете невозможно.
Для преодоления этого затруднения используется метод синтезирования апертуры антенны, заключающийся в запоминании отраженных от целей сигналов на участке траектории полета, длина которого равна требуемой длине антенны. Последующая обработка зарегистрированных сигналов в бортовой или наземной аппаратуре позволяет получить радиолокационное изображение с высокой детальностью.
В настоящее время наибольшее распространение получили оптические системы обработки. В их основе лежит голографический метод, при котором записанные на пленку радиолокационные сигналы (радиоголограммы) используются для формирования радиолокационного изображения.
В РСА принцип голографии используется как при регистрации отраженных радиоволн, так и в оптических устройствах ООС.
Опорная волна, проходя через голограмму, создает изображение объекта точно в том месте, где он находился в момент записи голограммы. Изображение
(точки) не будет точечным, а несколько размытым. Размер пятна δ x, определяющий детальность создаваемого изображения, можно найти из выражения, имеющего следующий вид:
δ x = λ R/X;
где λ - длина облучающей волны; R - Расстояние от голограммы до объекта; X - линейный размер голограммы.
Сформулируем основные особенности голографического процесса:
- необходимо наличие когерентных опорной и сигнальной волн;
- в процессе голографирования происходит перекодирование амплитуднофазового распределения поля сигнальной волны в амплитудное распределение сигнала и регистрация этого сигнала в виде голограммы (интерференционной картины);
- для восстановления изображения необходимо облучить голограмму опорной волной.
Глограммы обладают рядом интересных свойств. Одно из них состоит в возможности изменения масштаба изображения.Если одновременно изменить в одно и то же число раз линейный размер голограммы и длину волны восстанавливающего изображение пучка света, то в соответствующее число раз
изменится и масштаб создаваемого изображения. Если изменения длины волны и масштаба голограммы непропорциональны, то изображение также будет сформировано, однако в нем возникнут масштабные искажения. Во многих практических применениях эти искажения не играют существенной роли.
Это свойство позволяет записывать голограммы на одной длине волны, например в радиодиапазоне, а восстанавливать волновой фронт и наблюдать изображение на другой волне, в оптическом диапазоне.
Рассмотрим радиолокационную систему бокового обзора, установленную на борту самолета, как показано на рис.17.1. Предположим, что последовательность импульсных радиолокационных сигналов направлена на местность от радарной системыы на самолете и что отраженные сигналы, зависящие от отражательной способности местности, принимаются с площадки, близлежащей к курсу самолета. Назовем координату радиолокационного изображения, поперечную направлению полета, "дальностью", а совпадающую с трассой полета -"азимутом". Удобно также назвать координату, соединяющую траекторию радиолокатора на самолете с любой рассматриваемой целью, "наклонной дальностью". Если используется радиолокационная система обычного типа, то разрешение по азимуту будет иметь величину порядка λ r1 /D, где λ - длина волны радиолокационных сигналов, r1 - наклонная дальность, D - размер апертуры антены вдоль трассы полета. Однако длина волны радиолокационного сигнала на несколько порядков больше оптической волны и, следовательно, для того, чтобы получить угловое разрешение, сравнимое с разрешением системы фоторазведки, требуется очень большая величина апертуры антены D. Требуемая длина антены может составлять десятки и даже сотни метров. Очевидно, что на самолете это трудно реализовать.
Однако это затруднение можно преодолеть, применяя метод синтезированной апертуры. Основной принцип синтезирования апертуры состоит в том,что различные элементы решетки не обязательно должны существовать одновременно в пространстве. Предположим, что на самолете установлена маленькая антена бокового обзора и что относительно широкий луч радара сканирует местность за счет движения самолета. Положения самолета, в которых излучаются радиолокационные импульсы, можно рассматривать как элементы линейной антенной решетки. Тогда принимаемый сигнал в каждом из этих положений регистрируется когерентно как функция времени, поскольку на радиолокационный приемник подается опорный сигнал, позволяющий одновременно регистрировать и амплитудную, и фазовую информацию. Затем различные записанные комплексные волны соответствующим образом обрабатываются для синтеза действительной апертуры.
Чтобы изучить более подробно, как реализуется этот метод синтезирования антены, рассмотрим сначала задачу с точечной целью и затем распространим полученные результаты методом суперпозиции на более сложный случай. Предположим, что точечная цель находится в точке x1 .
Радиолокационный импульс формируется путем периодической прямоугольной модуляции синусоидального сигнала с угловой частотой равной ω .
Азимут Область обзора
где A1 - соответствующая комплексная постоянная. Комплексная величина A1 включает такие факторы, как излучаемая мощность, отражательная способность цели, фазовый сдвиг и закон распространения (обратно пропорционально четвертой степени мощности). Воспользовавшись параксиальным приближением, дальность r можно записать так:
где k = 2π /λ . Выражение (17.3) зависит от t и x, причем пространственные и временные переменные связаны между собой соотношением
где v - скорость самолета. Если теперь предположим, что местность на расстоянии r1 состоит из набора n точечных целей, то, воспользовавшись методом суперпозиции, запишем полный отраженный сигнал в виде
S(t) = ∑ An (xn ,r1 )exp{i[ω t-2kr1 -k(vt-xn )2 /r1 ]}. (17.5) n=1
Если отраженный радиолокационный сигнал, описывается (17.5),демодулируется с помощью синхронного детектора, то демодулированный сигнал можно записать так:
S(t) = ∑ An (xn ,r1 ) cos[ω c t-2kr1 -k(vt-xn )2 /r1 +ϕ n ], (17.6) n=1
где ω c - произвольная несущая частота, а ϕ n - произвольный фазовый угол. Для запоминания отраженного радиолокационного сигнала применяют
электронно-лучевую трубку. Подаваемый на нее демодулированный сигнал модулирует интенсивность электронного луча, который развертывается в вертикальном направлении синхронно с отраженными радиолокационными импульсами. Если изображение сигнала с экрана трубки спроектировать на фотопленку, которая перемещается в горизонтальном направлении с постоянной скоростью, то будет зарегистрирована последовательность трасс дальности, которые сформируют двумерное изображение (рис.17.2). Вертикальные линии описывают развертку по дальности, а по горизонтали откладываются положения азимута. Таким образом, зарегистрированное изображение представляет собой набор выборок сигнала S(t). Эта выборка осуществляется таким образом, что к моменту окончания записи сигналов на пленке она оказывается существенно неразличимой от первоначального сигнала. При такой регистрации очевидно, что переменные во времени преобразуются в переменные по пространству в значениях расстояния вдоль линии записи. При правильной экспозиции прозрачность регистрирующей пленки представляет изменение отраженного радиолокационного сигнала по азимуту. Таким образом, если рассматривать только данные, зарегистрированные в направлении y = y1 , амплитудное пропускание можно представить в виде
)2 +ϕ |
||||||||||||||
∑ A (x |
) cos[ω x-2kr |
|||||||||||||
r 1 v f |
||||||||||||||
Дальность (у)

След модулированногоАзимут (х) по яркости электронного луча
где K1 и K2 - смещение и коэффициент пропорциональности, x=vf t - координата пленки; vf - скорость перемещения пленки; ω x =ω c /vf . Поскольку косинус можно представить в виде суммы двух комплексно-сопряженных экспонент, то сумму в (7.75) можно записать в виде двух сумм T1 и T2 :
) exp{i[ω x-2kr |
)2 (x-x |
/v)2 +ϕ |
|||||||||||||||||||||||
)=---- ∑ A |
|||||||||||||||||||||||||
)2 (x-x |
/v)2 +ϕ |
||||||||||||||||||||||||
)=---- ∑ A |
) exp{-i[ω x-2kr |
||||||||||||||||||||||||
Для простоты ограничимся задачей для одной цели. Тогда для n = j уравнение (17.8) принимает вид
) = Cexp(iω x)[-i--- (----)2 (x - x |
/v)2 ], |
||||||
где C - соответствующая комплексная постоянная. Первая экспонента описывает линейную фазовую функцию, т.е. просто наклон излученной волны. Угол наклона к плоскости пленки определяется выражением
Таким образом, за исключением линейной фазовой функции, (7.76) является суперпозицией N положительных цилиндрических линз, центрированных в точках, определяемых выражением
x = vj xn /v, |
n = 1, 2, ..., N. |
Аналогично (17.9) содержит линейный фазовый множитель - 0 и описывает суперпозицию N отрицательных цилиндрических линз с центрами, определяемыми (17.14), и с фокусными расстояниями, описываемыми (17.13).
Для восстановления изображения транспарант, соответствующий (17.7), освещают монохроматической плоской волной, как показано на рис.17.3. Тогда можно показать, применяя теорию Френеля-Кирхгофа или принцип Гюйгенса, что действительные изображения, создаваемые T1 (x,y1 ), и мнимые изображения, создаваемые T2 (x,y1 ), будут восстанавливаться в передней и задней фокальных плоскостях пленки. Относительные положения изображений точечных рассеивателей распределяются вдоль линии фокусов, так как многочисленные центры линзоподобной структуры пленки определяются положением точечных рассеивателей. Однако восстановленное изображение будет размазано в направлениии y; вот почему эта пленка является по существу реализацией одномерной функции вдоль y = y1 и, следовательно, в этом направлении не оказывается никакого фокусирующего действия.
Поскольку нашей целью является восстановление изображения не только в азимутальном направлении, но и в направлении дальности, необходимо отображать координату y непосредственно на фокальной плоскости азимутального изображения. Чтобы выполнить это, необходимо напомнить, что оно прямо пропорционально дальности r1 . В свою очередь, фокусное расстояние прямо пропорционально рассматриваемой координате y. Таким образом, чтобы создать карту местности, мы должны отобразить координату y передаваемого сигнала на плоскость, положение которой определяется фокусными расстояниями азимутального направления. Это легко осуществить, установив положительную коническую линзу непосредственно за регистрирующей пленкой, как показано на рис.17.4. Очевидно, что если коэффициент пропускания конической линзы равен
x2 /2f), |
||||||

f - линейная функция от r1 , как показано в (17.13), то можно полностью удалить всю названную плоскость всей мнимой дифракции в бесконечность, при этом оставить коэффициент пропускания в направлении y неизменным. Таким образом, если цилиндрическую линзу поместить на фокусном расстоянии от пленочного транспаранта, мнимое изображение в направлении y получится в бесконечности. Пусть азимутальное изображение и изображение в направлении дальности (т.е. в направлениях x и y) совпадают, но в бесконечно удаленной точке. Их можно перенести обратно на конечное расстояние с помощью сферической линзы. При этой операции действительное изображение координат местности по азимуту и по дальности будет сфокусировано на выходной плоскости системы. Однако на практике желаемое изображение регистрируется через щель в выходной плоскости.
Проявленную вторичную пленку можно рассматривать и дешифрировать.